Designing a drone capable of meeting constraints of rigidity, strength, weight, aerodynamic performance, and acoustics: such was the challenge proposed this year to the second-year engineering students as part of the MECAERO project.
For six weeks, the students worked in groups on all the project’s stages: design, simulation, manufacturing, assembly, and flight testing. The course relies on a team of about fifteen instructors and PhD students specializing in material mechanics, structures, and aerodynamics, who were involved throughout the six weeks.
The MECAERO 2026 project brought together three groups of students (GR1, GR2, and GR3), each having designed their own drone platform. On the final day of April 29, the groups presented their work to a jury, unveiled their drones to the entire class, and then proceeded with flight tests in the School’s gardens.

A “Theory & Practice” Pedagogy
For Jean-Luc Bouvard and Rudy Valette, instructors of the project, this pedagogy is based on a strong connection between theoretical teaching and practical application: “The students first receive theoretical training (structural mechanics, materials, aerodynamics) and practical training in computerized tools (computer-aided design, calculations, etc.). We then give them a specification sheet: optimize the structure and propellers of a drone under certain constraints.“
The instructors also present students with an organization inspired by professional engineering practices: “We let them free to organize themselves after presenting the recommended group structure: project manager, structural design office, aerodynamic design office, and manufacturing team. Two tutors from the supervising team monitor the project’s progress for each group, in coordination with each project manager during regular check-ins. A group of experts (typically, instructors from the theoretical and practical core curriculum and a few PhD students in the field) is available during the 6 project days.“
This organization allows combining “a traditional teaching approach with the ‘theory & practice’ approach, more or less structured depending on the groups’ choices and needs.“ An approach that directly confronts students with the realities of an engineer’s work, including last-minute surprises: “Generally, it goes very well, even if the final rush sometimes reserves a few surprises, whose outcome is very often positive!“

From Digital Simulation to Real Manufacturing
One of the main objectives of MECAERO is to train students in modern design and optimization tools in mechanics and aerodynamics.
As the instructors point out, the project uses: “Relatively advanced knowledge in Mechanics and Materials, applied through the use of optimization tools theoretically seen in other courses. We notice tastes and programming skills often well beyond our expectations for some students! Some naturally turn to simulation. Others turn more towards a physical or technical approach. Ultimately, each student must master at least one know-how, often related to their position in the project (project manager, structure, aero, manufacturing).“

The integration of digital simulation, 3D printing, and FabLab resources plays a central role here: “This quickly allows confronting theoretical understanding with a resolution enabled by digital tools, and a materialization enabled by 3D printing coupled with advanced measurements. Students can quantitatively verify the validity of their tools and the relevance of their models, which can be disconcerting at first, but truly enriching.”

This constant confrontation between theory and reality particularly marked Esther Pautrel (GR3), involved in the design of the drone’s chassis. Her group had to arbitrate between several constraints: “mass, rigidity, and strength, and three different materials at our disposal: wood, aluminum, and PLA—a 3D printing material used for rapid prototyping.“
She explains: “In my group, we decided to prioritize the criteria of rigidity and strength by thinking about the choice of material (aluminum and PLA), as well as the geometry of the chassis. Indeed, since all the electronics added later on the drone (controller, motors, etc.) is very heavy, we decided that the mass of our chassis would not make a big difference compared to the mass of electronics that was imposed on us anyway. We still tried to lighten our chassis by hollowing out its structure (using a lattice at the end of the chassis arms, for example).“

But the transition from modeling to real manufacturing held several surprises: “The manufacturing time (printing, cutting the different parts, then the assembly itself) and the small fitting details of the different parts that make up the chassis, which you don’t necessarily notice when modeling, marked me during the transition from modeling to the actual manufacturing of the chassis.“
Esther also highlights the gap between the digital model and the concrete constraints of manufacturing: “In CAD (computer-aided design), all parts fit perfectly, everything works, and then you get to actual manufacturing and you have PLA parts that didn’t print perfectly, or you realize that you need to add a little more margin to properly fit the parts.“
For her, this iteration phase is precisely: “the beauty of an engineer’s work. Going from modeling to actual manufacturing, then back to modeling to change it, improve it, to really succeed in manufacturing the best possible chassis.“

Optimizing the Aerodynamics of the Propellers
On the aerodynamics side, Quentin Bonnet (GR1) worked with his group on the design of the drone’s propellers, a task combining calculations, digital simulation, and experimental validation.
“A propeller is determined by several parameters: its blade length, chord, pitch angle, number of blades, profile, wingtips, and blade offset,“ he explains. Among these parameters, some proved decisive: “the propeller length because it greatly influences the propeller’s lift power but also its consumption,“ as well as “the pitch“ and “the chord,“ optimized thanks to “a complex code for optimizing the incident air on the blade.“
The group ultimately chose: “CLARK Y profiles, with a 7.35 cm radius, with 4 blades, and a well-defined pitch/offset.” To guide these design choices, the students relied on fluid mechanics simulations (CFD): “We were able to establish the flow profile around a blade profile and thus eliminate profiles unsuitable for the characteristic flows of drones.“
The simulations also confirmed certain aerodynamic phenomena: “Adding blades increases the wake between them and decreases performance.” The project also led students to develop their own calculation tools. Quentin explains: “Some calculations were sometimes done by hand, sometimes done by hand and then solved numerically because there was no possibility of an analytical solution: this was the case for the pitch code, which made it possible to solve non-linear systems to determine our pitches and chords as a function of the distance from the hub. The code was written in Python.“

Testing, Measuring, Adjusting
The propellers’ performance was then experimentally evaluated using a test bench measuring thrust force, mechanical power consumed, electrical power, vibrations, and torque. The goal was to achieve minimal consumption while ensuring sufficient thrust, particularly to support a load of around 300 g. These measurements made it possible to compare the different propellers and validate the theoretical hypotheses formulated beforehand.
Quentin explains: “The main differences were related to the experimental conditions: the presence of the bench could influence the airflow coming out of the propeller, so there were symmetries and representativeness gaps in the measurement of our air speeds in reality compared to theory. This is why the code was adapted to take into account these experimental observations of the speed profile around the propeller. On the other hand, theory does not account for printing defects and the surface conditions of our propellers, just as it was not possible to simulate the 3D flow around the propeller, only around a 2D blade profile. It is also difficult to take into account in our calculations the wake states between the propellers, the presence of turbulent regimes, the interactions between the propellers of the air suction discs, etc.“
In this logic, the work carried out is part of an iterative approach: “We try to create a high-performance profile, as best we can, with our theory and hypotheses, and we seek to validate it experimentally to then refine our designs and get the best out of our propellers.“

A Collective Experience Close to Professional Practices
Beyond technical skills, the MECAERO project also places students in working conditions close to those encountered in the professional world.
“We were about fifteen working on the design of our drone,“ explains Esther. The students were divided into three different design offices (DO): “one DO in charge of the chassis design, one DO for the propeller design, and one DO for the actual production of the drone’s various components.“
The project also relied on a project manager: “who coordinated the three DOs and managed the progress and organization of the project.” For Esther, “The essential element when working in a group on a complex system is communication; it is important that everyone knows where the others are, which allows maintaining a consistent direction and progressing. To do this, we used the Miro platform, where we recorded the day’s progress, the deadlines for the different steps to be completed, and the small tips we had discovered in using the different software, for example. This experience well reflects current engineering practices in that the work is done in a group, each person brings their essential contribution to the team with their original ideas, and the realization of the complex system goes through very good communication between the different actors and the presence of a project manager to coordinate everything.“

For the instructors, the project’s success is not only measured by the drone’s final performance: “We do retain performance in relation to the specifications proposed in the project. But beyond that, we prioritize critical thinking and questioning, as well as personal and group research.”

MECAERO 2026: Final Review
At the end of the tests and evaluations, several internal distinctions highlighted the strengths of each group according to different technical and design criteria: stiffness, maximum force, and weight.
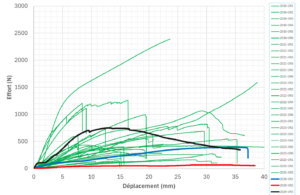
Force-Displacement curves obtained for all groups, from 2019 to 2026
For both instructors and students, MECAERO 2026 confirmed that engineering is learned by doing. The drones were tested in flight to demonstrate their stability, maneuverability, and ability to survive the unexpected. Some groups, like GR3, even dared to perform aerobatic figures, rewarded with a dedicated prize.
In the end, MECAERO 2026 illustrated the importance of iteration (modeling > manufacturing > testing > improvement) and the balance between theory and practice. A pedagogy through action, where technical rigor meets creativity.
Back in Pictures














