L’IA au service de l’ingénierie classique
L’article récompensé propose une solution novatrice pour améliorer le « dead reckoning », une technique de navigation basée sur les informations inertielles et d’odométrie, pour déterminer le mouvement d’un véhicule à roues. Les informations sont fournies par des capteurs IMU (Inertial Measurement Unit), ou centrale à inertie, un instrument utilisé en navigation capable d’intégrer les mouvements d’un véhicule pour estimer son orientation, sa vitesse et sa position. Elles sont combinées avec les mesures des tours de roues (odomètres) pour calculer la trajectoire d’un véhicule à partir de sa dernière position connue.
Historiquement utilisée dans l’aéronautique et la marine, la navigation inertielle peut être utilisée dans l’automobile, notamment avec l’avènement des véhicules autonomes. Cependant, les capteurs étant moins coûteux que ceux utilisés dans l’aéronautique, l’estimation tend à s’écarter rapidement de la trajectoire réelle. Pour surmonter ces obstacles, l’équipe a eu recours à l’intelligence artificielle, mais de manière ciblée : l’IA est employée uniquement pour déterminer à tout instant le degré de confiance que la navigation inertielle peut avoir en les mesures des tours de roues.
L’IA peut ainsi compenser les lacunes des méthodes traditionnelles. Plutôt que de remplacer complètement les techniques éprouvées de navigation, l’IA est utilisée pour améliorer des aspects que les techniques classiques peinent à traiter, notamment dans des conditions non modélisées ou imprévisibles (glissements des roues).
L’un des traits les plus remarquables de ces travaux est qu’ils parviennent à rivaliser avec les méthodes basées sur la vision par caméra. En effet, les résultats expérimentaux obtenus montrent une erreur de trajectoire inférieure à 1 %, ce qui en fait une alternative sérieuse aux systèmes utilisant des caméras. Cela ouvre de nouvelles perspectives pour les véhicules autonomes, notamment pour prendre le relai sur la vision en cas de problème (défaut de la caméra, manque de luminosité, route enneigée).
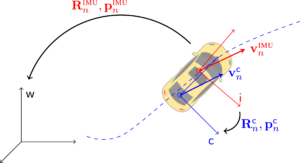
Ce schéma issu de l’article montre les différents systèmes de coordonnées utilisés dans l’étude. Le but est de retrouver la trajectoire de la voiture (en bleue) à tout instant, sans utiliser la vision.
Une collaboration stratégique avec les entreprises
L’article primé s’inscrit dans l’orientation de Mines Paris – PSL qui favorise les partenariats entre la recherche et le monde de l’entreprise. En effet, il s’agit d’un travail conjoint avec l’entreprise Safran, spécialiste des systèmes de navigation et l’un des leaders mondiaux du secteur, qui illustre parfaitement l’approche multidisciplinaire nécessaire pour faire progresser la navigation autonome.
Martin Brossard, qui a rédigé cet article lors de sa thèse au CAOR, travaille aujourd’hui chez Helsing, une entreprise spécialisée dans l’intelligence artificielle. Axel Barrau, ancien chercheur associé au CAOR, co-directeur de la thèse et ingénieur chez Safran au moment de la rédaction de l’article, est aujourd’hui directeur technologique de la startup Offroad, dont les systèmes de cartographie automatique de haute précision permettent une nouvelle gestion de l’espace public. Leurs contributions, aux côtés de celles de Silvère Bonnabel, démontrent la richesse et la diversité des talents formés au sein de Mines Paris – PSL.

Voiture de course autonome de l’Université d’Auburn, sponsorisée par Safran Electronics & Defense
Un prix international prestigieux récompensant une recherche de haut niveau
Le CAOR, depuis sa création, a joué un rôle pionnier dans le domaine des véhicules intelligents. Cette vision avant-gardiste est en grande partie due à Claude Laurgeau, professeur, roboticien et fondateur du centre en 1988 qu’il dirige jusqu’en février 2008. Dès les années 1990, Claude Laurgeau anticipait déjà les développements technologiques actuels. Son ouvrage, Le siècle de la voiture intelligente, publié aux Presses des Mines, témoigne de cette anticipation des évolutions à venir dans le domaine des transports autonomes.
Le prix du meilleur article de la revue IEEE T-IV, reçu il y a quelques jours, couronne une recherche de plusieurs années, évaluée sur des critères d’originalité, de citations, d’impact et d’importance pour la communauté scientifique. La revue IEEE T-IV, journal international à forte visibilité comme en témoigne son facteur d’impact de 14, publie de nombreux articles, triés par des comités de relecture. Cette reconnaissance n’est pas seulement une récompense individuelle, mais confirme également la place privilégiée du CAOR à l’international dans la recherche sur les véhicules intelligents, un axe historique du laboratoire.
Ce n’est d’ailleurs pas la première fois que Silvère Bonnabel est distingué pour ses contributions. En 2020, il avait déjà reçu un prix similaire pour ses travaux dans le domaine de l’automatique, une branche de la robotique se trouvant au cœur des recherches menées au CAOR, ainsi que le Prix Européen de l’Automatique en 2021, et le prix IMT-Académie des Sciences en 2022.
Une portée au-delà de la recherche académique
Le prix récompense ainsi non seulement l’originalité de la recherche, mais aussi son impact potentiel dans le monde réel. À une époque où les véhicules autonomes prennent une place de plus en plus importante dans les projets de mobilité du futur, cette avancée technologique ouvre la voie à de nouvelles applications concrètes.
Lire l’article récompensé
Les auteurs