Le développement des véhicules autonomes connaît un essor sans précédent. Cependant, pour atteindre un niveau de sécurité et de performance optimale, ces systèmes doivent être capables de comprendre et d’anticiper les comportements des autres usagers de la route.
Le Mines Paris Research Day, qui s’est tenu à Paris le 2 juillet 2024 à Mines Paris – PSL, offre l’opportunité de découvrir les recherches de pointe menées à l’École, en facilitant les échanges entre chercheurs, grandes entreprises, et start-ups. Cet événement met en lumière la synergie entre science et industrie, à travers cinq défis clé : la transition énergétique, la gestion responsable des ressources, les industries culturelles et créatives, la science des données et l’IA mais également la mobilité du futur. C’est dans cette optique que le projet coopératif HAIBrid, s’inscrivant dans une collaboration franco-allemande, propose d’intégrer des techniques d’IA hybrides pour modéliser les comportements routiers et améliorer les systèmes de conduite automatisée.

Comprendre les comportements routiers grâce à l’IA
La clé de la conduite automatisée repose sur une compréhension précise des interactions entre les différents usagers de la route. Cependant, la collecte de données à grande échelle, comme les trajectoires des véhicules et des piétons, présente des défis de taille. En effet, l’annotation manuelle de ces données est fastidieuse, et la grande variabilité des situations rend difficile la classification des interactions.
HAIBrid vise à surmonter ces obstacles en s’inspirant des avancées récentes en apprentissage non-supervisé, une branche du machine learning caractérisée par l’analyse et le regroupement de données non-étiquetées (sans nom) et dont les algorithmes apprennent à trouver des schémas ou des groupes dans les données, avec très peu d’intervention humaine. Cette approche permettrait d’extraire automatiquement les trajectoires et de classifier les interactions à partir de données issues de caméras de trafic, de drones et de capteurs embarqués. Grâce à ces données, le projet ambitionne également de générer des cartes 3D enrichies d’informations sémantiques cruciales pour la planification des véhicules automatisés.
Les technologies de la modélisation des trajectoires
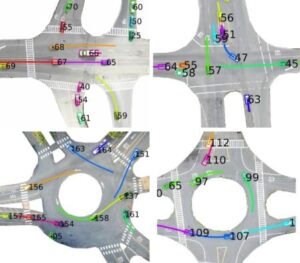
L’un des principaux défis de HAIBrid réside dans l’extraction et l’étiquetage automatique des trajectoires à grande échelle. Les méthodes actuelles de détection et de suivi des objets, bien qu’efficaces pour certaines tâches, rencontrent encore des difficultés lorsqu’il s’agit de traiter des scènes complexes, notamment en raison des occlusions et de la diversité des objets à suivre (véhicules, piétons, etc.).
Le projet propose donc une approche hybride, combinant des modèles basés sur la physique et des techniques de deep learning non supervisé. Cette hybridation permettra de mieux traiter les données vidéo et de construire des trajectoires précises, tout en tenant compte des particularités de l’environnement 3D.
L’importance de la cartographie 3D
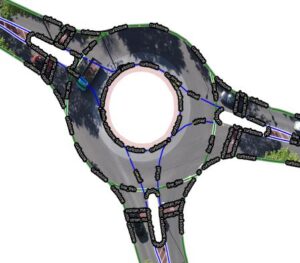
En plus de l’extraction des trajectoires, HAIBrid se concentre sur la création de cartes 3D automatiques. Ces cartes fournissent un cadre essentiel pour comprendre les interactions routières en intégrant des informations telles que les marquages au sol, les panneaux de signalisation et la configuration des intersections.
Cependant, la création de ces cartes 3D est un processus complexe et coûteux, généralement réalisé à l’aide de véhicules d’arpentage sophistiqués. HAIBrid propose de réduire la dépendance à ces équipements coûteux en s’appuyant sur des techniques de vision par ordinateur et de deep learning, offrant ainsi une solution plus abordable pour la cartographie à grande échelle.
Modéliser les interactions pour une meilleure prédiction
Une autre innovation clé du projet réside dans la modélisation des comportements et des interactions entre les usagers de la route. Plutôt que de se contenter de prédire les trajectoires individuelles, HAIBrid se penche sur les interactions collectives. L’objectif est de créer des modèles prédictifs capables d’anticiper non seulement les actions des véhicules automatisés, mais aussi celles des autres usagers, qu’il s’agisse de voitures, de piétons ou de cyclistes.
Pour ce faire, le projet s’appuie sur des techniques permettant d’identifier des comportements récurrents dans les données de trafic. Ces modèles pourront ensuite être utilisés pour améliorer la prise de décision des véhicules autonomes et rendre leur conduite plus fluide et naturelle, en s’adaptant aux comportements des autres usagers.

Des résultats concrets pour l’industrie automobile
Le projet HAIBrid ne se contente pas de produire des innovations théoriques. En plus de nouveaux jeux de données issus de la collecte par caméras, drones et capteurs, le projet développera des méthodes et des outils pour la capture et la labellisation des trajectoires et des interactions. Ces avancées profiteront à l’industrie automobile en fournissant des solutions plus efficaces pour la conduite automatisée.
L’amélioration des algorithmes de prédiction des interactions collectives, associée à des informations de cartes sémantiques détaillées, permettra une prise de décision plus précise au sein des véhicules autonomes. En fin de compte, HAIBrid contribuera à rendre les véhicules automatisés plus sûrs, plus coopératifs et plus capables de s’adapter aux complexités du trafic routier.
Pour en savoir plus :
Contacter Sascha Hornauer